 Jobandis
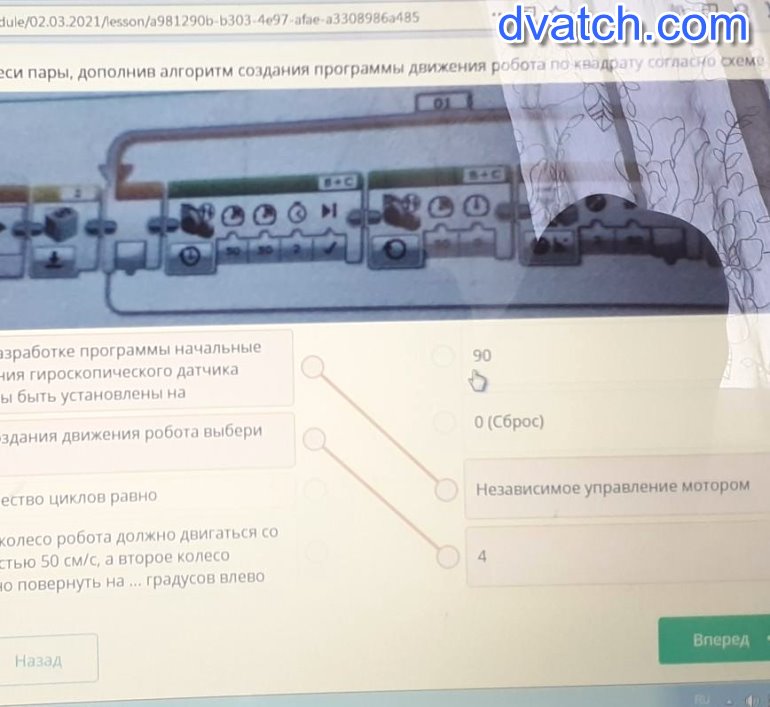
JobandisСоотнеси пары, дополнив алгоритм создания программы движения робота по квадрату согласно схеме01В-СВ С50 50so90При разработке программы начальныезначения гироскопического датчикадолжны быть установлены наО (Сброс)Для создания движения робота выбериблокНезависимое управление моторомКоличество циклов равноE4Одно колесо робота должно двигаться соскоростью 50 см/с, а второе колесодолжно повернуть на . . . градусов влевоBoepe
ответы: 1
Зарегистрируйтесь, чтобы добавить ответ
Ответ:
1-3 2-4 3-0 ( сброс ) 4-90
Надеюсь помог!
344
 barefoot
barefootЧтобы ответить необходимо зарегистрироваться.